(!:. ربات انسان نما .:!)
اولین ربات انسان نمای هوشمند در ایران(!:. ربات انسان نما .:!)
اولین ربات انسان نمای هوشمند در ایرانKondo KHR-2HV Humanoid Robot
|
「超初心者にも“できる”ホビーロボット入門ガイド」
"Ultra in newbie",
"Introduction to Hobby Robot" |
|
|
|
|
Reported by高橋敏也 Reported by Toshiya Takahashi |
|
|
|
|
|
|
Many lives, many battery. Hobby's two-legged robot system is mainly used in rechargeable battery. Among the batteries, for example, use AA batteries as well. However, many of them nickel-cadmium (Ni-Cd) and nickel-metal hydride type (Ni-MH) type of rechargeable battery unit is used. This series is assembled in the KHR-2HV, the nickel-metal hydride battery is set. KHR-2HV KHR-2HV standard nickel-metal hydride battery 10.8V, 300mAh of capacity. Robot Watch also includes a special set of two spare batteries are also more nickel-hydrogen battery at 10.8V, 800mAh.
ホビー系の二足歩行ロボットでは、主に充電式のバッテリが用いられる。中には乾電池、例えば単三電池を使用するものもある。しかし、その多くはニッカド(Ni-Cd)タイプやニッケル水素(Ni-MH)タイプの充電可能なバッテリユニットを使用している。本連載で組み立てているKHR-2HVは、ニッケル水素バッテリがセットになっている。標準のニッケル水素バッテリは10.8V、300mAhという容量だ。さらにRobot Watchスペシャルセットに含まれている2本の予備バッテリも、やはりニッケル水素バッテリでこちらは10.8V、800mAhである。
It is held at Lane robot in the
competition, lithium polymer (Li-PO) type of battery you are using a lot of
people see sports. 小型で容量が大きく、放電量に優れたリチウムポリマーバッテリは、ロボット向きと言っていい。
Large and small, the discharge amount of outstanding RICHIUMUPORIMABATTERI the
robot to say Kito Mukai. しかし、初心者ユーザにはお勧めできない面もある。 However, not
recommended for novice users also. そう、扱いが難しいのである。 Yes,
treatment is difficult. まず何より信頼性の高い製品を選ばなくてはならないし、充電設定などを誤ると発火などの危険が強まる。
Above all, a reliable and should not be選BANAKU
products, such as charging in the wrong setting and increasing the risk of
fire. 保管などの管理にも、十分気を使わなくてはならない。
To manage and store enough gas to use. ある程度知識がついてから、じっくり取り組むべきバッテリなのである(注:ホビーロボットの世界では、という話だが)。
With some degree of knowledge, is that the battery must be addressed carefully
(Note: the robot in the world of hobby, but the story).
さて、それでも新しいものや、ベテラン向けのものを使いたくなるのが、我が愛すべき友人である。
Now, a new one yet, and for those veteran使ITAKU
to be our beloved friend. 買ってきて組み立てたばかりのKHR-2HVをこよなく愛し、先日はついにロボット競技会を見学して来たという友人。
Just put it together to buy the KHR-2HV loves the recent robot competition
visit finally came to a friend.
「リポだよ、リポ!
オレもバッテリをリポに変えようと思うんだ!」
"It's Lipoic, lipoic! I change the battery, and I do not think I
lipoic!"
気持ちはわかるが友よ、しばし待て。
I know my friend, wait a short time. 君は「リポ」という言葉は知っていても、それが「リチウムポリマー」の略称だということも知らなかったではないか。
You, "lipoic" I know the word, even though it "lithium
polymer" did not know the abbreviation of it? 君は某有名ドリンクの名称を、真っ先に思い浮かべていたではないか。
You drink a certain well-known names, was thinking first and foremost? 扱いが難しいバッテリなのだから、もう少し慣れてからにしようよ。
It's difficult to treat from the battery, a little more accustomed to it.
なお、リチウムポリマーバッテリは、信頼できるものをちゃんと使っている分にはまったく問題ない。
In addition, the RICHIUMUPORIMABATTERI trust, and what is decent minutes with
no problem at all. しかし、そうでない場合の危険性が高いのも事実なので、十分注意して欲しい。
However, it is not a high risk the facts, so I want to be careful. 個人的にはKHR-2HVの場合、ニッケル水素バッテリが一番だと思っている。
KHR-2HV personally in the case, the nickel-metal hydride battery is the most I
think.
●ニッケル水素バッテリを、充電しよう! ● nickel-metal hydride battery, charger!
さて、最初にバッテリの話を持ってきたのは偶然ではない。
Well, first brought the story of the battery is not a coincidence. 前回、サーボモーターの原点出しを行なったが、その際にKHR-2HV付属のバッテリ、あるいはオプションで購入したバッテリを使用したはずだ。
Last, the servo motor ran out of the starting point, but the KHR-2HV attached
to a battery, or use an optional battery that should be purchased. 使ったバッテリは充電しなければならない。
The battery must be recharged using. そこでまず、Robot Watchスペシャルセットに含まれる充放電器、MX-301を使ってニッケル水素バッテリを充電しよう。
First, Robot Watch special set of instruments included in the charge and
discharge, MX-301 is used to recharge the nickel-metal hydride battery.
MX-301は安全かつ高速に、さまざまなタイプのバッテリを放電、あるいは充電することができる。
MX-301 is safe and high-speed, a different type of battery discharge, or can be
charged. もちろんKHR-2HVのニッケル水素バッテリにも対応しており、自動で放電を行ない、放電が終了してから充電を行なうこともできる。
KHR-2HV of course, also supported nickel-metal hydride battery, which drove
automatic discharge, the discharge from the end of charging can be done. 実はこれが重要なことで、ニッケル水素バッテリは「使って残りを放電、それから充電」が基本なのである。
In fact, it is important that the nickel-metal hydride battery, "with the
rest of discharge and then recharge" of the base. こうしないと「メモリ効果」という、やっかいな現象を引き起こしてしまう可能性があるのだ(ある程度までバッテリを使い、そのまま充電した際に起こる。充電された容量をバッテリが憶えてしまい、フルに容量を使えなくなってしまう現象)。
Failing to do this and the "memory effect" that could lead to
troublesome behavior may be (to use the battery to a certain extent, they occur
when charged. Recharge the battery capacity and they remember the full capacity
Phenomenon that could be unusable).
通常、ニッケル水素バッテリは約200回の充放電が可能と言われているが、KHR-2HVのようなロボットで使用した場合、この寿命が短くなってしまうことも多い。
Typically, the nickel-metal hydride battery charge and discharge of about 200
times that it is possible, KHR-2HV robots used in such cases, the life span is
often short. 長く安定してニッケル水素バッテリを使用するコツは、「しっかり放電、安定充電」なのである。
Long, stable and tricks to use nickel-metal hydride battery, "tight
discharge, charging stability" is. ではMX-301を使って充放電を行なう場合の設定は、どのようにすればいいのか? 設定する項目は放電電流、放電終了電流、そして充電電流の3つである。
In the MX-301 charge and discharge using the settings if you do, what can we
do? Discharge current set of items, end-discharge current, and the three
charging current. 私の経験上の設定では不安だったので、近藤科学さんに問い合わせてみた。
In my experience the anxiety on the set, so he tried to contact Mr. Kondo
science. すると以下のような推奨設定値を提示してくれた。
The following recommendations made to present value.
|
|
・KHR-2HV標準バッテリ KHR-2HV standard battery |
・ROBOパワーセルHV Dタイプ ROBO-power cell type HV D |
|
|
Ni-MH 10.8V 300mAh Ni-MH 10.8V 300mAh |
Ni-MH 10.8V 800mAh Ni-MH 10.8V 800mAh |
|
放電電流 Discharge current |
0.3A |
0.8A |
|
放電終了電流 Exit current discharge |
8.1V |
8.1V |
|
充電電流 Charging current |
0.3A |
0.8A |
ポイントとなっているのは放電、充電共に「1C」が安全、安定しているということ。
The point is the discharge, charging both "1C" safe, stable, he said.
「1C」というのは1セルということではなく、例えば300mAhのバッテリなら「300mA(0.3A)で1時間」充電、放電するということ。
"1C" means that instead of a single-cell, for example, if you 300mAh
battery "300mA (0.3A) 1 hour," charging and discharging that. 「2C」なら2倍の電流で充電、放電できるため、時間も半分で済む。
"2C" If you double the current charging and discharging, so in half
the time goes. なお、放電終了電流はバッテリのセル数に、0.9Vをかけて算出されている。
In addition, the discharge end to the current number of the battery cell, 0.9V
to spend is calculated.
バッテリの充放電時は、必ずそばにいて状況をいつでも確認できるようにすること。
When the battery charge and discharge, you are close to the situation to be
able to check at any time. たまにバッテリ本体に触れて、異常な発熱が無いかをチェックしよう。 Sometimes
referred to the battery itself, there are no abnormal heat to check. もちろんMX-301の設定を間違えないように、十分注意したい。
Of course, the MX-301間違ENAI
settings, so that you want to be careful. それとバッテリの残量がかなり少なくなっている場合、MX-301で充放電を行おうとすると、エラー表示されてしまう場合がある。
And the amount of remaining battery if you are far less, MX-301 in the attempt
to charge and discharge, the error would be displayed. そんな時は、充電のみを行なえばいい。
In such times, should I charge only行NAE.
なお、上記のほかにも近藤科学さんから、バッテリを扱う上でのコツを聞いてみた。
However, in addition to the above science from Kondo, tips on dealing with the
battery I've heard. そのうちいくつかを紹介すると、例えば調子の悪いニッケル水素バッテリを充電中、電圧表示が13V後半から14Vを超えるようなら、そのバッテリは寿命だと思っていいそうだ。
And to introduce some of them, for example, out of kilter with nickel-metal
hydride battery is charging, the voltage display of more than 14V to 13V for
the second half, I thought that the battery life is good. また、メモリ効果が発生してしまったバッテリでも、放電-充電をゆっくり繰り返すと、リフレッシュする場合があるとのこと。
In addition, the memory effect has occurred in the battery discharge - a charge
repeated slowly, and may be refreshed. 近藤科学のSさん、ご協力ありがとうございました。
Kondo S's of science, Thank you for your cooperation.
|
|
|
|
MX-301はニッカドバッテリ、ニッケル水素バッテリなど、さまざまなバッテリを充放電できる充電器だ。 NIKKADOBATTERI the MX-301, such as nickel-metal hydride battery, battery and charger can charge and discharge. 近藤科学製ということで、もちろんKHR-2HVのバッテリコネクタを接続するケーブルも付属している Kondo was made in science, of course, the KHR-2HV BATTERIKONEKUTA also comes with cables to connect the |
左がKHR-2HVに標準付属するバッテリ、右がRobot Watchスペシャルセットに含めたオプションのバッテリ。 KHR-2HV left to come with a standard battery, Robot Watch Special to the right of the battery, including options. 共にニッケル水素バッテリで10.8V、異なるのは容量だけである Both nickel-hydrogen battery at 10.8V, is different only in that capacity |


|
|
|
|
電源を入れた直後のMX-301。 Turn right after the MX-301. モードは「ニッカドバッテリの充電」になっている Mode, "NIKKADOBATTERI charge" is |
まずバッテリモードを「Ni-MH」、すなわちニッケル水素に変更する First, the battery mode, "Ni-MH", namely to change the nickel-metal hydride |


|
|
|
|
次に充放電のモードを「DISC→CHG」、放電してから充電に切り替える Then the charge and discharge modes "DISC → CHG", switch to charge and discharge from the |
ここではオプションの800mAhのバッテリを充放電するので、放電電流は0.8A(800mA)に設定する Here's an option 800mAh battery charge and discharge, so the discharge current is 0.8A (800mA) is set to |


|
|
|
|
次は放電終了電流の設定。 The following discharge end of the current settings. オプションバッテリは9セルなので、0.9Vまでの放電を9セルで行なう「0.9V×9=8.1V」とする Since the 9-cell battery option, 0.9V to the discharge will 9 cells "0.9V × 9 = 8.1V" and |
最後に充電電流を設定し、準備完了。 Finally set charging current and ready. 充放電をスタートする。 Will start to charge and discharge. 放電が設定値まで行なわれると、自動的に充電へと移行する Value will be set up to discharge and automatically move to charge |
|
|
|
充電が終了した状態。 By the end of charging state. 約63分、充電にかかったことが分かる。 About 63 minutes, took charge in the know. 充電が終わると、MX-301は自動的に微量の電流で充電し続ける「トリクル充電」状態となる After the charge, MX-301 will automatically continue to charge a small amount of current "trickle charging" state and |
● KHR-2HV、出来たどー!(ハードウェアだけ) ● KHR-2HV, was DO! (Hardware only)
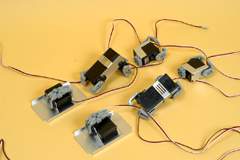
MX-301がバッテリをせっせと放電し、充電してくれている間に、筆者はKHR-2HVの完成を急ぐ。
Work on the MX-301 discharge the battery, while charging for me, I speed up the
completion of the KHR-2HV. 各サーボモーターの原点を設定しつつ、組み立てと配線作業を同時に進めるのである。 Set
the origin of each servo motor, while at the same time assembling and wiring
work is ahead. というかこの段階に至ると、組み立てながら配線の具合をチェックすることになる。
From the previous stage, the wiring assembly will be to check the weather. ちなみにここでいう「配線」とは、サーボモーターから伸びるケーブル(サーボリード)の取り回しを意味している。
By the way, but here, "wiring" and the growing cable from the servo
motor (servo lead) means取RI回SHI.
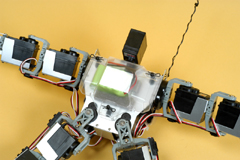
各サーボモーターから伸びるケーブルは、最終的にKHR-2HVが背中に背負うコントロールボードへ接続することになる。
Servo motor cables extend from each of the KHR-2HV ultimately carrying on the
back to connect to the control board. KHR-2HVは二足歩行ロボットであり、複数のサーボモーターで構成された手足を、かなりの範囲で動作させることになる。
KHR-2HV the two-legged robot, and consists of multiple-limb servo motor, is
considerable scope to work with. このためケーブルを一定の姿勢に合わせてピンと張ってしまうと、次の動作に移った際にケーブルに大きな負担をかけてしまうのだ(最悪断線する)。
For this reason the cable pins with a certain attitude and pride, they moved to
action following a heavy burden on the cable when it is over (bad breaks). また、ケーブルの通り道を考えておかないと、ケーブルに引っ張られて動作が制限されたり、関節部分にケーブルが挟まってしまうこともある。
Also, considering the way the invitation of the cable, the cable is pulled is
limited to work or挟MAっcable joints where they can. そういった意味でも配線作業はロボットにとって、大変重要なものなのだ。
In that sense the robot's wiring work, it's very important.
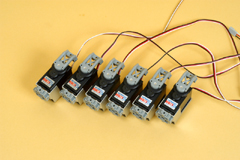
上記を踏まえて組み立て作業を行なっていくわけだが、まずはブラケットBユニット6個に、サーボアーム700Aアッパーアーム、ボトムアームを取り付ける。
Based on the above assembly is done to the six units in the first bracket B,
upper arm 700A servo arm, install a bottom arm. 繰り返しになるのだが、アッパーアームは原点出しをしてから取り付ける。
To be repeated, but the upper arm from the origin to fit out. ボトムアームは自由に動くものなので、フラットヘッドホーン止めビスを締めすぎないように注意して欲しい。
Bottom arm is moving freely, so FURATTOHEDDOHON to stop tightening screws and
just want to note.
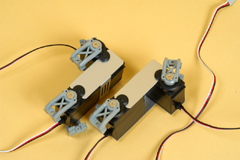
ブラケットBユニットの次は「膝+脛」、すなわちレッグユニットの作業である。
Unit B, the next bracket, "tibial knee +", ie REGGUYUNITTO work. こちらも原点を出してサーボアームを取り付ける作業なのだが、膝部分のサーボモーター左右2個は、原点の設定値が異なるので注意して欲しい。
Servo origin had also install the arm's work, right and left knee two of the
servo motor, the setting is different because the starting point of hope
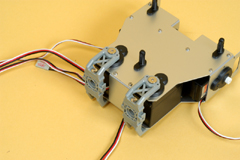
careful. レッグユニットの次はフットユニット2個、さらにボディユニットにもサーボアームを取り付ける。
Two of REGGUYUNITTO FUTTOYUNITTO Next, the servo arm and a body attached to the
unit. なお、サーボアーム700Aベースには向きがあるので、イラストと見比べて間違えないようにしたい。
In addition, the servo arm 700A-based orientation, so the illustrations and間違ENAI want to見比BE.
さて、このサーボアームとベースの取り付けで「なかなかはまらない」と悩む人が多い。
Now, the servo-based mounting arm and a "hard alternative" A lot of
people suffer. まず最初に注意して欲しいのは、決して無理をしないということだ。
The first thing I want to pay attention to, but not impossible, he said. 無理をして破損してしまっては、元も子もないからだ。
And it had damaged the original is not good. ただし、ある程度の力を加えないとサーボアームとベースが、きっちりはまらないのもまた事実。
However, the degree of arm strength and make the servo-based, but also exactly
the facts of the alternative. サーボモーターの軸になるべく無理な力を加えないようにしながら、ギュッギュッと押し込んで行こう。
Servo motor shaft power to make the impossible possible so that, while going
firmly push firmly. マニュアルにも書いてある通り、ヘアドライヤーなどで少し暖めてあげるのもいい手である。
As the manual is written in, such as a hair dryer to warm up a bit is a good
move.
全てのパーツにサーボアームなどを取り付け終わったら、いよいよ最終組み立てに入る。
All arms and other parts attached to the servo finished, finally enter the
final assembly. だがその前に、ケーブルガイドというパーツをランナーから切り出して、手元に用意しておこう。
But before the cable is cut from Runner's Guide to the parts, I'll have to
hand. 腕、脚、ボディから伸びるケーブルを、このケーブルガイドで格好良く取り回して行く。
Arms, legs, extend the cable from the body, the cable guide取RI回SHI
go well dressed. なお、1つのケーブルガイドで最大5本のケーブルをまとめることができるのだが、ネジ穴のある内側に2本、外側に3本というのをあらかじめ把握しておこう。
In addition, one of the five largest cable guide the cables can be put
together, but the screw holes on the inside of two books, three of outside let
me know in advance.
マニュアル通りに行くなら脚(レッグ)、腕(アーム)、次にボディの準備をしてから、全てのパーツを合体という流れになる。
Manuals peduncle If you go to the street (leg), arms (arm), and then prepare
the body, and then unite all the parts that go with the flow. もちろん腕と脚は左右対称、2つセットで組み立てる訳だが、この時に結構左右を間違える。
Symmetrical arms and legs, of course, is not assembled in two sets, side to
side quite wrong at this time. 何度マニュアルを見て確認しても、間違える。
Check the manual to see what time it is wrong. 間違えないコツは、作業を進めていく段階で頻繁にパーツを並べて左右対称具合を確かめることだ。間違ENAI tips, will be working side
by side at the parts often so make sure to be symmetrical.
また、組み立てと同時にケーブルの配線を行なうが、動作した際に突っ張らないだけの余裕を持たせることが大切だ。
In addition, assembly and wiring for cable at the same time, but it works only
when the margin of突張RANAI
is important to give. サーボモーターは、ゆっくりなら手で動かしても問題はない。 Servo motor that
moves slowly by hand if you have a problem. 実際に膝を曲げたり、足首を左右に曲げたりして、ケーブルに無理な力がかかっていないことを確認しつつ、作業を進めよう。
In fact bending their knees or ankles or bending from side to side, and that
excessive force cable to make sure that it is not working on forging ahead.
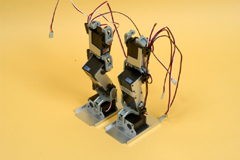
脚、腕、ボディが揃ったらロボットアニメ並みに、それらを合体させる。
Legs, arms, body揃TTARA
level of robot anime, to unite them. 人型の二足歩行ロボットがほぼ組み上がる、感動の瞬間である。
Type of person that almost two-legged robot built up the excitement of the moment.
もし時間と心に余裕があるなら、じっくり眺めながらお茶をするもよし、記念撮影をするもよし、友人に電話をするもよし……。
If you can spare the time and heart, you also have tea with a good look OK, OK
anniversary of the shooting, a good friend to call. しかし、これで作業が終わったわけではない。
However, this does not mean the end of work. コントロールユニットを背中に載せなくてはならないし、ヘッドユニットを組み立ててそれを組み付けてやらなくてはならない。
Control unit and must not載SENAKU
backs, it assembling units to head the Assembly should not do.
そしていよいよ、各サーボモーターとコントロールボードの接続である。
And the more because each of the servo motor and control board is connected. チャンネルをマニュアルで確認しつつ、ピンを曲げないように慎重に接続していく。
Check the manual channel, while careful to stick pins to connect to. ここで重要なのはコネクタの向きだが、KHR-2HVでは原則、黒いラインがコントロールボードの外側に向くようコネクタを接続する。
The important thing here is the orientation of the connector, KHR-2HV
principles in the black lines on the outside of the control board connector to
connect to face. 例外は無いので、コネクタの接続だけに関して言えば、目視で簡単にミスをチェックできる訳だ。
No exceptions, so only when it comes to connecting the connector, a visual
check errors can be easily translated. なお、マニュアルには無いジャイロセンサーのケーブルは、コントロールボードのAD入力1、AD入力2に接続する。
However, no documentation gyroscopic sensor cables to the control board's AD,
type 1, AD connected to the input 2.
配線をある程度整理し、接続状態を確認したら、次はバッテリの収まるスペースを作り出すフロントカウル、そして背中のコントロールボードを被うボードカバーの加工を行なう。
To organize some of wiring, you see the connection, the next step is to create
a space to fit in the Batteries FURONTOKAURU, clothe and board the back cover
of the Board of Control for processing. KHR-2HVのパッケージには、2個のポリカーボネート製のパーツが付属している。
The KHR-2HV package includes the two parts made of polycarbonate is included. これらのパーツは不要な部分を切り落とし、使用できる状態にする。
These areas cut off unnecessary parts, is ready to use. この時、くれぐれも注意して欲しいのが“手を切らないように”ということだ。
At this time, is sure to want to pay attention "to cut your hands,"
he said. とくにカッターナイフを使っていて、刃先が滑ってしまい「ザックリ」ということもあるからだ(経験者は語る)。
In particular, using a box cutter, cutting edge that had slipped away,
"ZAKKURI" is sometimes (who said experience).
切り出しのコツは、浅く溝を掘り、それをじょじょに深くする。
Tip of the crop, shallow trench dug deep to it gradually. ある程度まで深くなると、手で何度か折り曲げれば割れるように分離する。
Will be deeply and to some extent, it折RI曲GERE several times by hand to
isolate the break. ハサミで不要な部分を切り落としてしまい、細かい部分を溝を作って折るようにすればいい。
Scissors to cut off unnecessary parts, and they groove to make details to do so
broken. なお、パーツの厚みは場所によって異なるので、力加減が重要になってくる。
In addition, the location depending on the thickness of parts, so that power is
important adjustment. 焦らずゆっくり作業するのが一番だ。焦RAZU most of the work is slow. ちなみに刃先の尖ったデザインカッターのようなものがあれば、細部の加工が楽になる。
By the way, the sharp edge like a cutter design, as it will facilitate the
processing of detail.
|
|
|
|
勢揃いした6個のブラケットBユニット。 Seizoroi bracket B of the six units. 原点出しをして、アッパーアームを取り付ける And a starting point, attach the upper arm |
サーボアームを固定するため、フラットヘッドホーン止めビスを使用する。 Servo arm to hold the FURATTOHEDDOHON to stop using the service. アームが回転するのは元に戻せばいいので問題ないが、締めすぎには注意 , A former arm of the rotation, so the problem can Back it up, tightening too much attention to |

|
|
|
|
ボトムアームも固定する。 Fixed arm to the bottom. ボトムアームはブラブラしているのが正常な状態だ。 Bottom of the arm by doing the normal state. こちらも締めすぎに注意 Also of tightening too much attention to |
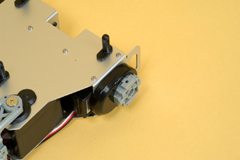
レッグユニットは膝部分のサーボモーターを、異なる原点値に設定するので注意 REGGUYUNITTO servo motor of the knee, set the value of different origin Note |
|
|
|
|
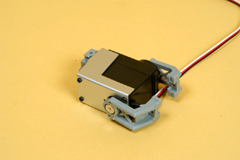
フットユニットはサーボアームだけでなく、アームベースも取り付ける。 As well as the servo FUTTOYUNITTO arm, the arm-mounted. 落ちついて「グッ」と力を入れる(入れすぎ注意)。 Take it easy, "Goodbye" and focus (put too much attention). パチッと音がするまで、しっかり押し込まなくてはならない To snap up the sound, must be firmly押SHI込MANAKU |
ボディユニット、股関節の部分にもサーボアームを取り付ける。 Body Unit, as part of the hip and arm mounted servo. 原点出しを忘れないように Do not forget to put the origin |

|
|
|
|
ここでケーブルガイド、アームサポーターなど、これから使うものを用意しておこう The Cable Guide, arms and supporters, we'll have something to use |
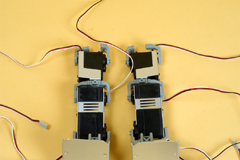
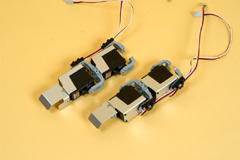
両脚を組み立てる。 Assemble the legs. ちなみにこの写真、左側の脚のブラケットBユニットに注目。 By the way, this photo on the left side of the bracket B unit focusing on the legs. ちゃんと正しく配置している Are properly aligned properly |
|
|
|
|
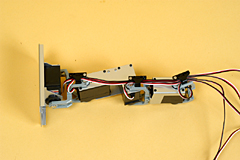
「よし、出来た!」と思って写真を撮影してから気がついた。 "Well, good!" I noticed from the photo shoot. やはり左脚、上部のブラケットBユニットに注目。 I left leg, look at the top of the bracket B units. なんと逆に取り付けてあったのだ。 What has been installed in reverse. こういう間違いは決して珍しくない(苦笑いで終わるレベルだが) It's not unusual never wrong (which is ending with a wry smile) |
これがレッグユニットの正しい完成図。 REGGUYUNITTO this figure completion of the right. 左右を見比べて、対称をチェックすると間違いに気づきやすい 見比BE to the left and right, and wrong to check symmetry to be realized |
|
|
|
|
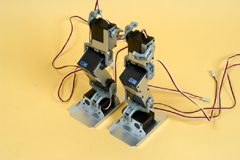
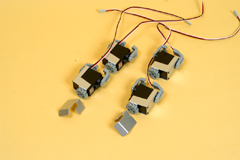
ケーブルガイドでケーブルをきれいに捌いていく。 Cable guide to cable捌I clean. 余裕を保たせることを忘れないで Can afford to keep in mind that |
なんかいい雰囲気になってきたなあ……。 I do not have a good atmosphere. 実にセクシーな脚である It is sexy legs |
|
|
|
|
アームユニットを組み立てる。 Arm assemble a unit. 手先のパーツが登場した。 Part of the hand appeared. これがまた、取り付け方向を間違いやすいパーツなので注意 It also installed parts are easy to mistake the direction of attention |
完成したアームユニット。 Arm unit was completed. ケーブルガイドを使って、やはりケーブルを整理する。 Cable Guide, using it to organize cables. まあ、サーボモーターの数が少ないので、このあたりは楽なのだが Well, a small number of servo motors, so this is an easy per |
|
|
|
|
ボディユニットを完成させる。 Body to complete the unit. アームサポーター、アームベース、ローハイトサーボホーンなどを用意する。 Supporters arm, the arm-based, and to prepare ROHAITOSABOHON. もちろん肩部分のサーボモーターの原点出しを忘れないように Of course, the origin of the shoulder portion of the servo motor to keep out |
アームサポーター、ローハイトサーボホーンの順番で取り付ける Supporters arm, mounted in the order ROHAITOSABOHON |

|
|
|
|
そこにアームベースを固定するのだが、ローハイトサーボホーンと隙間が出来てしまう場合があるので注意(ピッタリ密着するのが正しい) There is a fixed base arm, and the gap ROHAITOSABOHON we can get the attention it (the right of the right to contact) |
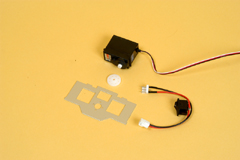
ヘッドユニットも一緒に組み立ててしまおう。 Head unit'm also assembled together. ちなみにKHR-2HVにとって頭は飾りのようなもの。 By the way for the KHR-2HV head like a decoration. 予備のサーボモーターが付属しているようなものである The reserve has come with a servo motor is like |
|
|
|
|
どこかの白いモビルスーツと一緒で、KHR-2HVは頭が無くても動作する。 Mobile Suits with somewhere in the white, KHR-2HV also works without a head. というか、動作に問題ないのだが、ちょっと見た目が悲しい Or rather, to work fine, but look a little sad |
ヘッド、ボディ、アーム、レッグの合体前 Head, body, arm, leg before the merger of |
|
|
|
|
めでたく合体! 合体時に格好のいいフレーズを叫ぶと、気分はロボットアニメのヒーローである。 Happy unite! Looking at merging with a good shout phrases, the mood is the hero of the animated robot. 一応この状態でも立つのだが、いつ倒れるか分からないのでほどほどにしておこう But this state is a sort of stand, but do not know when it struck down enough to let it |
コントロールボードを取り付け、ヘッドユニットから伸びる電源ケーブルをコントロールボードに接続する Mounted on the control board, the head units extend from the power cable to connect to the control board |

|
|
|
|
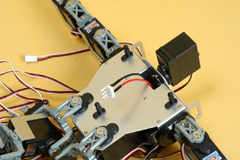
ちなみにヘッドユニットのスイッチから伸びているバッテリへの接続ケーブルは、KHR-2HVの前面に出す By the way, the unit's head has grown from the switch to the battery cable connections, KHR-2HV out in front of |
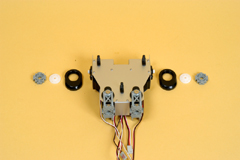
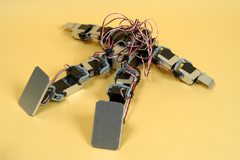
KHR-2HVの臀部(注:ケツ)で、下半身から伸びてきたケーブルを整理している点に注目。 The KHR-2HV buttocks (Note: your ass), the cable has grown from the lower body to focus on organizing. また、ボディ内部から伸びているジャイロセンサーのケーブルは、すでにコントロールボードへ接続している In addition, the body has grown from a gyroscopic sensor inside the cable, already are connected to the control board |
|
|
|
|
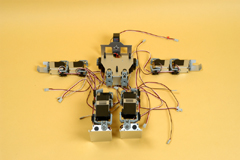
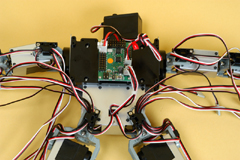
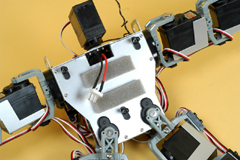
全てのサーボモーターをコントロールボードに接続した All servo motor connected to the control board |
なんとなく有機的なメカという雰囲気があっていいのだが、いかんせんもっと整理しないとカバーに収まらなくなってしまう A mechanical sort of organization we should have an atmosphere, but not compromised organizes more収MARANAKU is to cover |

|
|
|
|
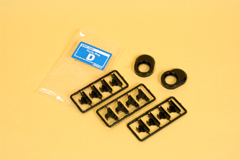
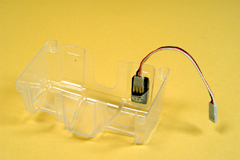
ポリカーボネート製のフロントカウルとボードカバー。 FURONTOKAURU cover made of polycarbonate and board. 表面に薄い保護シートが貼ってある。 Put on the surface of a thin sheet that is protected. それを剥がすと透明になる。 剥GASU and it will be transparent. 塗ってよし、貼ってよし Well put, put OK |
切り出しの際には、怪我をしないように十分注意したい。 When the crop, not to hurt you want to be careful. 一気に切断など無理なので、溝を深くしていく方向で考えよう Since not all at once, such as cutting, a deep trench to look in the direction of |


●加速度センサーと無線コントロールユニットの受信機を内蔵する ● acceleration sensor and a radio control unit with a built-in receiver
カウルの切り出しが終わったら、それらを取り付け「ハードウェア的には」KHR-2HVの完成である。
At the end of the crop Kaul, mounting them, "the hardware" KHR-2HV is
completed. おめでとう!
これであなたも二足歩行ロボットのオーナーだ。
Congratulations! That you are the owner of two-legged robots. もっとも初期設定を終わらせるまでは、完成したKHR-2HVが歩いたり、ダンスしたりすることは無いのだが。
The default setting is to bring an end to the completion of the KHR-2HV
walking, dancing, and it can not.
ここで注目して欲しいのがKHR-2HVの背中、ボードカバーの方である。
Here I want to look at the KHR-2HV the back of the board of the cover. KHR-2HV付属のマニュアルでは配線を整理しながら、カバーを取り付ければいい。
KHR-2HV included in the manual to organize the wiring, and attach it should
cover. しかし、Robot
Watchスペシャルセットの場合は、このボードカバーの中に「加速度センサー」と「無線コントローラーの受信機」を内蔵しなくてはならないのだ。
However, Robot Watch set of special cases, the board covered in the
"acceleration sensors" and "wireless controller receiver"
will have to be built.
まず加速度センサーだが、難しく言ってしまうと「角速度を計測するセンサー」ということになる。
First, acceleration sensor, but it is difficult to say "angular rate
sensor to measure", he said. これをKHR-2HVでは転倒した状態の判別に使用し、起き上がるモーション(動作)と組み合わせて、倒れたときに自動で起き上がるようにする(応用的な使い方も可能なのだが)。
In the fall KHR-2HV used to determine the state and get up-motion (operation)
in combination with the fallen to get up automatically when you (can be applied
also in use.) ここでは近藤科学の「2軸加速度センサー
RAS-2」を1個、使用する。
Kondo science in this "2-axis accelerometer RAS-2" one to use.
取り付け、そしてコントロールボードとの接続は極めて簡単。
Mounting, and the connection to the control board is extremely simple. ただし、ここで1つお詫びがあります。
However, this is one apology. 実はRAS-2をコントロールボードと接続するには、「別売りオプション」の接続ケーブル・100ミリが1本必要になるのです。
In fact, the control board and RAS-2 to connect to the "Extra
options" to 100 milliseconds of a single cable connection is required. Robot Watchスペシャルセット、この接続ケーブルが含まれていませんでした。
Special Robot Watch set, but this does not include cable. お手数ですが別途購入してください。
Please, please be purchased separately.
RAS-2の取り付けで注意する点は、向きと接続である。
RAS-2 point to note the mounting direction and connection. マニュアル通りの設定を後から行なうので、近藤科学のサイトからダウンロードしたHeart
To Heart3操作説明書上級編の写真通りに、両面テープなどでしっかり固定する。
After the street from the manual settings for the Kondo downloaded from the
site of science operations manual Heart To Heart3 photos of knitting as a
senior, double-sided tape and firmly fixed. また、RAS-2には2つのコネクタがあるのだが、センサー本体側のコネクタに左右を間違えないように接続する。
In addition, RAS-2 to have two connectors, but the sensor itself to the left
and right side of the connector to connect to間違ENAI.
コントロールボードの接続先は、AD入力3である。
Is connected to the control board, AD, type 3.
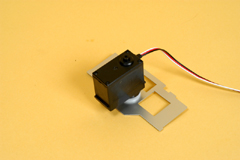
一方、無線コントローラーの受信機は、Robot
Watchスペシャルセットの「KRC-3AD
無線コントロールセット」に含まれている。
Meanwhile, the wireless controller receiver, Robot Watch special set of
"KRC-3AD set of radio controls" are included. コンパクトなボックス、KRR-1がそれだ。
A compact box, KRR-1 is it. すでにKRR-1には受信機用のクリスタルが取り付けてある。
The KRR-1 for a crystal receiver is attached. このKRR-1をコントロールボードの左右、どちらかに両面テープで固定する。
The KRR-1 on both sides of the control board, either fixed to the double-sided
tape. さらに付属のケーブルでコントロールボードの「低速シリアルポート」と接続すればいい。
In addition the cables of the control board, "low-speed serial port"
I do connect with. ちなみに無線コントロールセットに含まれている、もう1本のケーブルはKHR-2HVの場合使用しない。
By the way radio sets are included in the control and the other a single cable
if you do not use the KHR-2HV.
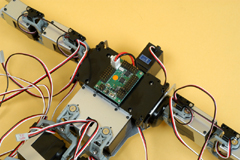
加速度センサー、無線コントローラーの受信機を固定したら、配線の整理をしながらボードカバーを閉じる。
Acceleration sensor, a fixed wireless controller receiver, you sort of circuit
board and close the cover while. なお、KHR-2HV本体パッケージに付属する、延長ケーブルをコントロールボードの高速シリアルポートへ接続するのを忘れないように。
In addition, KHR-2HV included in the package itself, extension cables to the
control board's high-speed serial port to connect to forget. これはコントロールボードとPCを接続する高速シリアルポートが、ボードカバーを取り付けると使いにくくなるため、外部に出すためのケーブルだ。
The control board and high-speed serial port to connect your PC, your board and
become difficult to attach a cover for the cable to go outside.
ボードカバーを固定するためには、ケーブルをある程度整理しなくてはならない。
In order to cover a fixed board, the cable must be organized to some extent. だが、徹底的にケーブルを整理する必要もないと思っている。
However, the need to thoroughly clean up the cable and I'm not. なぜならKHR-2HVのようなロボットはメンテナンスが必要になるし、その際にはボードカバーを開けて作業することもある。
KHR-2HV like, because robots need to be maintained, and when you open the cover
and the board can work. 従ってケーブルの整理は、ボードカバーが無理なく固定できる程度まででいいというのが、筆者の個人的な見解である。
Therefore, the liquidation of the cable, the cover board until the extent it
can be fixed without a fine, but my personal opinion. なお、ボードカバーを固定する際には、受信機のアンテナも一緒に固定してあげよう。
The board fixed to cover the receiver and antenna also want fixed. また、高速シリアルポートから伸ばした延長ケーブルは、ボードカバーの外側に両面テープで固定すればいい。
In addition, extended high-speed serial port extension cable from the board on
the outside of double-sided tape to cover it fixed.
さあ、ここまで来たら追い込みである。
Now, here comes the home stretch. フロントカウル内、バッテリの入る部分に付属のスポンジを貼り付ける。
FURONTOKAURU in a battery attached to enter the portion you want to paste a
sponge. 一応、バッテリを接続して(電源スイッチがオフになっていることを確認)、フロントカウルがきっちり閉まるかどうかを確認する。
Supposedly, is connected to the battery (the power switch is turned off, make
sure), the FURONTOKAURU determine whether the close-fitting. もしボディピンを差し込みにくいようなら、フロントカウルを少し削って調整してあげよう。
Difficult to pin and Merge body as if you cut a little FURONTOKAURU you want me
to adjust.
前後のカウル、そしてカバーは半透明だが、それは表面に保護用のシートが貼ってあるから。
The Cowl around, and the cover is translucent, it's on the surface of the
protective sheet is posted. シートを残して半透明状態で使用するもよし、はがして美しい透明状態で使用するもよし。
With a translucent sheet used in a good state, beautiful strip in a state of
transparency and good use. あるいはポリカーボネート用の塗料で、好みの色に塗ってもいい。 Or paint for
polycarbonate, but painted a favorite color. ちなみにボードカバーは内部空間の広いラージタイプがオプションとして販売されているし、表面がカーボンファイバー模様になっているタイプも販売されている。
Incidentally Board RAJITAIPU cover a wide internal space is sold as an option,
the surface is carbon fiber type patterns are also sold. このあたりは、じっくりカスタマイズしてあげるのも面白いだろう。
Hereabouts, I take the time to customize it will be interesting.
ここまでの作業で、間違いは無かっただろうか?
何か忘れていることは無いだろうか?
マニュアルとじっくり見比べながら、もう一度確認しておこう。
In this work, no mistakes? Is something not to forget?見比BE manual and slow, but let me check again. ハードウェアは今回で完成、組み立て完了である。
In the completion of the hardware, the assembly is complete. いよいよ次回はKHR-2HVに命を吹き込む作業、さまざまな設定を行なう。
The next KHR-2HV finally breathe life into work, for a variety of settings. KHR-2HV、大地に立つ! いや、テーブルに立つ日が、ついに訪れるのだ……って、1つ筆者が忘れてました。
KHR-2HV, stand on the earth! No, I stand on the table, but has finally come ...
I remember one of my boys. そうです、KHR-2HVの足裏をRobot Watchスペシャルセットに含まれている、バスタブソールと交換しておきましょう。
Yes, KHR-2HV Robot Watch Special to the bottom of the feet are set, take the
time to exchange BASUTABUSORU. このように作業工程が多いと、忘れ物も多くなるのです……(本当に忘れていました、すいません)。
Many in this process, is to be a lot of things left behind ... (I had
forgotten, Excuse me).
|
|
|
|
近藤科学の加速度センサー、RAS-2。 Kondo science acceleration sensors, RAS-2. 簡単に言ってしまうとKHR-2HVが倒れた時に、それを感知するのに使用する I could easily have fallen KHR-2HV and when it is used to detect |
本当にごめんなさい! Robot Watchスペシャルセットに、加速度センサーRAS-2とコントロールボードを接続する「接続ケーブル 100ミリ」を入れ忘れました。 I'm so sorry! Robot Watch special set, and RAS-2 acceleration sensors connected to the control board, "100-millimeter cable"入RE忘REMASHITA. 別売りされているオプションパーツなので、別途購入してください Outboard is sold separately, so please be purchased separately |


|
|
|
|
ボードカバーの内部に両面テープで加速度センサーを固定する。 Boards cover the acceleration sensor inside the double-sided tape to be fixed. 向きとコネクタを間違えないように注意 Kito Mukai attention to the connector間違ENAI |
無線コントロールセットの受信機KRR-1を、アンテナロッド、接続ケーブルと一緒に用意する Radio control set for the KRR-1 receiver, antenna rod, with a cable to connect |

|
|
|
|
KRR-1を低速シリアルポートに、延長ケーブルを高速シリアルポートに接続する KRR-1 in the low-speed serial port, serial port extension cable to connect to high speed |
KRR-1自体はコントロールボードの左右、どちらかに固定する KRR-1 both sides of the control board itself, either to a fixed |


|
|
|
|
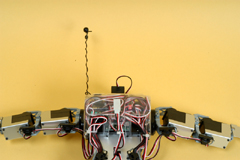
配線を整理し、ボードカバーを取り付ける。 Organize your wiring, and attach a cover board. ボードカバーを固定する際、アンテナロッドも一緒に固定しよう When the cover Lock the board, with an antenna fixed to the rod |
高速シリアルポートに接続した延長ケーブルのコネクタを、ボードカバーの外側に両面テープで固定する High-speed serial port connector extension cable to connect to the board with double-sided tape to cover fixed to the outside |
|
|
|
|
KHR-2HVの前面、バッテリが格納される部分にスポンジを貼り付ける。 KHR-2HV the front of the battery is stored the parts you want to paste a sponge. このスポンジはバッテリを保護するクッションにもなるので結構重要 The sponge cushion to protect the battery is also quite important |
試しにバッテリを入れて、フロントカウルを閉じてみる。 Put on trial for battery, try to close the FURONTOKAURU. フロントカウルの切断具合によっては閉じづらい場合もある。 FURONTOKAURU hard to close the case by cutting so as well. そんな時は少しずつ調整しよう It is a little time to adjust |
|
|
|
|
すっかり忘れていたバスタブソール。 BASUTABUSORU was forgotten. 標準のアルミ製足裏を取り外し、バスタブソールに交換しておこう The standard aluminum remove the back foot, let me exchange BASUTABUSORU |
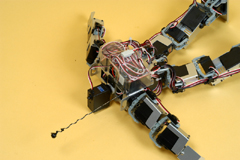
「ハードウェア的には完成」したKHR-2HV。 "In the completion of the hardware," said KHR-2HV. ちなみに電源が入っていなくても立つのだが、いずれ倒れるのでそのままにしておかないように。 By the way, even if they do not have the power to stand, but because both fall to keep intact. 次回、このKHR-2HVに命を吹き込む! Next time, to breathe life into KHR-2HV! |


「ロボットを人型にする理由? ロボットが人間の“友達”になってほしいから」
-あるロボット研究者の言葉- - The words of a robot scientist --
■関連記事 ■ Articles
・「超初心者にも“できる”ホビーロボット入門ガイド」 "Ultra in newbie", "Introduction to Hobby Robot"
-KHR-2HVの購入から起動、歩行までを完全網羅- Buy-KHR-2HV from the start, walking up to full coverage --
-Mission04- -Mission04 -
「KHR-2HV、怒濤の組み立て編、パート2」(2008/11/04) "KHR-2HV, hen assembly Tao Ikari Warriors, Part 2" (2008/11/04)
2008/11/07 23:13 2008/11/07 23:13
ممنون که باکس را در وبلاگتان قرار دادید. من فکر ف ی ل تر شدن وبلاگها را هم کرده بودم به همین دلیل از تصویر و کر جاوا استفاده کردم .
موفق باشید